Controladores por conmutación para motores de corriente directa
En resumen
Con el medio puente H, podemos controlar en lazo abierto la velocidad de un motor de CD, por medio de los modos motor y de frenado regenerativo.
Con el puente H podemos controlar en lazo abierto la velocidad de un motor de CD, por medio de los modos motor, de frenado regenerativo, de frenado dinámico y de frenado inversión de rotación.
Los controladores por conmutación para motores de corriente directa son unos de los controladores más utilizados para el control de velocidad de estos en lazo abierto y lazo cerrado. Además, también son componentes básicos para el control de posición de motores de CD en lazo cerrado. También los podemos utilizar en otros tipos de cargas.
Se recomienda primero leer la publicación Modos de operación de un motor de corriente directa para poder comprender mejor lo que sigue.
Controlador para modo motor
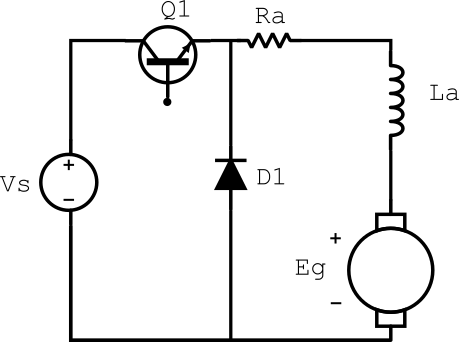
En la imagen anterior se muestra el circuito de conmutación que se utiliza para la operación de modo motor. El circuito opera de la siguiente forma:
- El transistor $Q_1$ está inicialmente en modo de corte y no circula corriente por la malla de la armadura del motor.
- Al pasar el transistor $Q_1$ al modo de saturación, casi toda la tensión de la fuente $Vs$ cae sobre el motor. Entre otras cosas, gracias a la corriente $i_a$, el inductor $L_a$ se carga magnéticamente.
- Al pasar nuevamente el transistor $Q_1$ al modo de corte, la inductor $L_a$ se descarga produciendo una corriente en el mismo sentido de la corriente con la que se cargó. Se inducirá una tensión en el inductor en el sentido opuesto a $E_g$, y por un instante será superior a $E_g$.
- Esto causará que el diodo $D_1$ se polariza directamente y conduce. Esto produce dos efectos: primero descarga el inductor $L_a$ y, en segundo lugar, se mantiene la corriente sobre el motor, manteniendo el par que produce el motor.
- El ciclo se repite.
Este tipo de circuito opera de forma similar a un convertidor reductor. En el siguiente video, se explican cómo funcionan estos convertidores. Para compararlo con nuestro circuito, sustituimos el capacitor y la resistencia de carga por el motor de CD.
Controlador para modo de frenado regenerativo
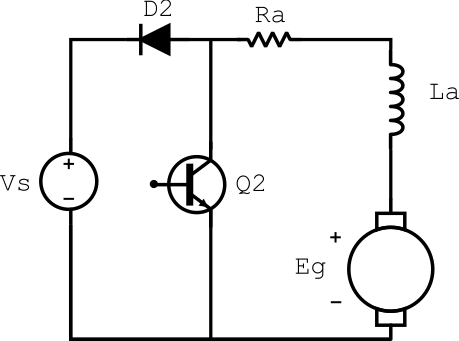
En la imagen anterior se muestra el circuito de conmutación que se utiliza para la operación del motor en modo de frenado regenerativo. Es importante notar que la fuente de poder debe ser capaz de absorber la potencia recuperada del motor. El circuito opera de la siguiente forma:
- El transistor $Q_2$ está inicialmente en modo de corte y el diodo $D_2$ está polarizado inversamente, por lo que no circula corriente por la malla de la armadura del motor. Además, el motor debe tener una velocidad inicial, por lo que tenemos una fuerza contraelectromotriz mayor a cero.
- Al pasar el transistor $Q_2$ al modo de saturación, empieza a circular una corriente en la malla de armadura, gracias a la fuerza contraelectromotriz.Entre otras cosas, gracias a la corriente $i_a$, el inductor $L_a$ se carga magnéticamente. Además, el motor opera como generador, consumiendo par.
- Al pasar nuevamente el transistor $Q_2$ al modo de corte, la inductor $L_a$ se descarga produciendo una corriente en el mismo sentido de la corriente con la que se cargó. Se inducirá una tensión en el inductor en el mismo sentido que $E_g$.
- Esto causará que el diodo $D_2$ se polariza directamente y conduce, ya que la suma de las tensiones en el inductor y $E_g$ es mayor al voltaje de la fuente. Esto produce tres efectos: primero descarga el inductor $L_a$, en segundo lugar se transfiere esa corriente a la fuente de poder, y en tercer lugar se va frenando el motor.
- El ciclo se repite.
Este tipo de circuito opera de forma similar a un convertidor elevador. En el siguiente video, se explican cómo funcionan estos convertidores. Para compararlo con nuestro circuito, sustituimos la fuente de alimentación por el motor.
Controlador combinado o medio puente H
En la siguiente imagen se muestra el circuito de un controlador de medio puente H.
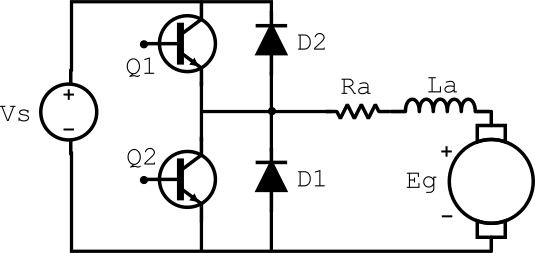
Con este circuito, podemos controlar en lazo abierto la velocidad de un motor de CD. Esto es gracias a que puede controlar al motor en modo motor y en modo de frenado regenerativo.
En realidad, el medio puente H combina en uno solo los circuitos del controlador para modo motor y el controlador para modo de frenado regenerativo. Por lo mismo, hemos mantenido la nomenclatura de los circuitos anteriores.
Para operar en modo motor, se utilizan el transistor $Q_1$ y el diodo $D_1$ y se sigue el mismo procedimiento planteado del controlador para modo motor.
Para operar en modo de frenado regenerativo, se utilizan el transistor $Q_2$ y el diodo $D_2$ y se sigue el mismo procedimiento planteado del controlador para modo de frenado regenerativo.
Puente H
En la siguiente imagen, se puede ver el circuito de un controlador de puente H.
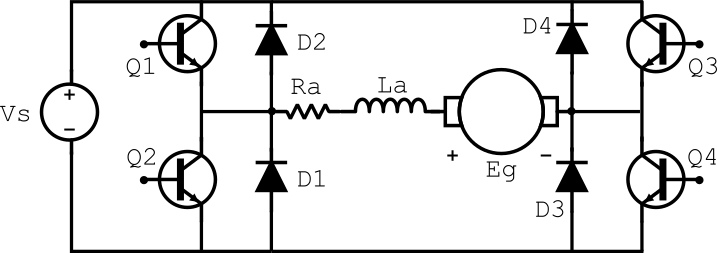
Con este circuito, podemos controlar en lazo abierto la velocidad de un motor de CD en dos sentidos diferentes, tanto en modo motor y en modo de frenado regenerativo. El circuito es en realidad dos medios puentes H conectados al motor de CD.
Lamentablemente, la mayoría de las referencias en el Internet no utilizan de la mejor manera este circuito, ya que consideran motores pequeños. Por eso fue importante revisar previamente los controladores para los modos motor, de frenado regenerativo y el controlador medio puente H.
Para el medio puente H de la izquierda se preservó la nomenclatura utilizada en controlador combinado o medio puente H. Por conveniencia, supondremos que este medio puente H se considerará para el sentido de giro directo.
Para operar en modo motor en sentido directo, se utilizan el transistor $Q_1$ y el diodo $D_1$ y se sigue el mismo procedimiento planteado del controlador para modo motor. La única diferencia es que también se utiliza el transistor $Q_4$; este transistor se mantendrá siempre en saturación, es decir no estará conmutando. Esto permite que la corriente en el motor se mantenga. El transistor $Q_3$ estará siempre en corte.
El siguiente video muestra este tipo de operación, aunque se dice explícitamente que $Q_4$ se mantiene encendido mientras $Q_1$ conmuta, lo hace de una manera muy rápida.
Para operar en modo de frenado regenerativo en sentido directo, se utilizan el transistor $Q_2$ y el diodo $D_2$ y se sigue el mismo procedimiento planteado del controlador para modo de frenado regenerativo. Los transistores $Q_3$ y $Q_4$ siempre estarán en corte.
Para operar en modo motor en sentido inverso, se utilizan el transistor $Q_3$ y el diodo $D_3$ y otra vez se utiliza lo planteado en el controlador para modo motor, haciendo los ajustes adecuados a la nomenclatura. Además se mantendrá el transistor $Q_2$ siempre en saturación y el transistor $Q_1$ estará siempre en corte.
Finalmente, para operar en modo de frenado regenerativo en sentido inverso, se utilizan el transistor $Q_4$ y el diodo $D_4$ y se vuelve a utilizar el procedimiento del controlador para modo de frenado regenerativo. Otra vez hay que considerar los ajustes necesarios en la nomenclatura.
El puente H también puede operar el motor en los modos de freno dinámico y por inversión de giro. En el siguiente video se muestra eso precisamente.