Modos de operación de un motor de corriente directa
En resumen
Para que un motor de CD produzca par (avance) se debe tener que $V_a > E_g$.
Para que un motor de CD consuma par (frene) se debe tener que $V_a < E_g$.
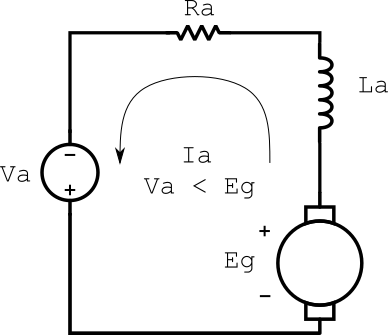
En el control de velocidad en lazo abierto de un motor de velocidad se pueden considerar cuatro modos de operación. Para entender estos modos de operación es conveniente empezar por revisar el circuito de la armadura de un motor de corriente directa (CD).
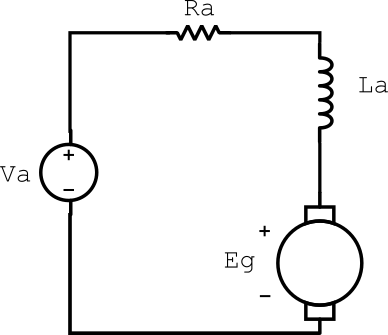
Como se puede ver en la imagen anterior, existen dos fuentes de voltaje en la armadura. La primera es la fuente del voltaje de armadura, $V_a$. La segunda fuente de voltaje se debe a la fuerza contraelectromotriz del propio motor, $E_g$. Es importante notar que solo podemos manipular directamente $V_a$.
Dependiendo como manipulamos $V_a$ con respecto a $E_g$, es posible operar el motor para que produzca par o consuma par.
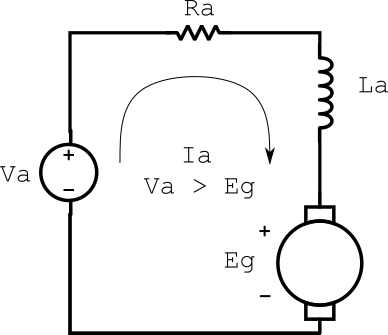
En el modo motor, tenemos que que el voltaje de armadura, $V_a$, debe ser mayor a la fuerza contraelectromotriz, $E_g$. Usando el circuito de la imagen de arriba, la corriente en la malla va en el sentido horario. Este es el modo normal de operación del motor. En este modo el motor produce par.
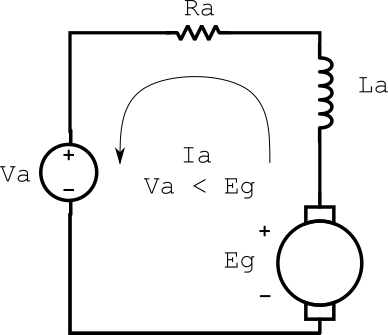
Después, tenemos el modo de frenado regenerativo, donde el voltaje de armadura del motor es menor que la fuerza contraelectromotriz de éste. En este momento, la dirección de la corriente de armadura es en el sentido contrario al modo motor. En este caso, el motor consume par y produce corriente. Esto produce el frenado del motor. Es importante notar que para que funcione este modo, la fuente de alimentación debe ser capaz de absorber la corriente generada por el motor.
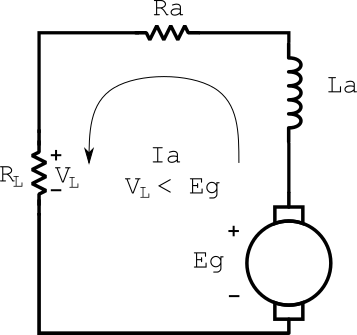
Luego tenemos el modo frenado dinámico. En este caso se desconecta la alimentación de la armadura y en su lugar se conecta un resistor. La caída de tensión en la resistencia de frenado es menor que la fuerza contraelectromotriz. De nuevo, el sentido de la corriente es en el sentido inverso del modo motor.
Finalmente, tenemos el modo de frenado por inversión de la rotación En este caso, la polaridad de voltaje de armadura se invierte, con lo que tenemos que el voltaje de armadura es menor que la fuerza contraelectromotriz. Nuevamente, se invierte el sentido de la corriente y el motor frena.